
Luke Hollis
I'm a research scientist in simulation and computational robotics. I'm interested in world model development and simulation environments for embodied AGI. I create simulation environments for the Harvard Computational Robotics Group and several research groups at MIT.
I previously bootstrapped a spatial computing startup and engineered large-scale enterprise 3D rendering pipelines.
Outside of my research, I volunteer and practice western-style boxing.
w1: World-state Frame Foundation Model
Run simulation with a foundation geospatial model and economic, geopolitical, logistics data to see counterfactual events and alternative histories
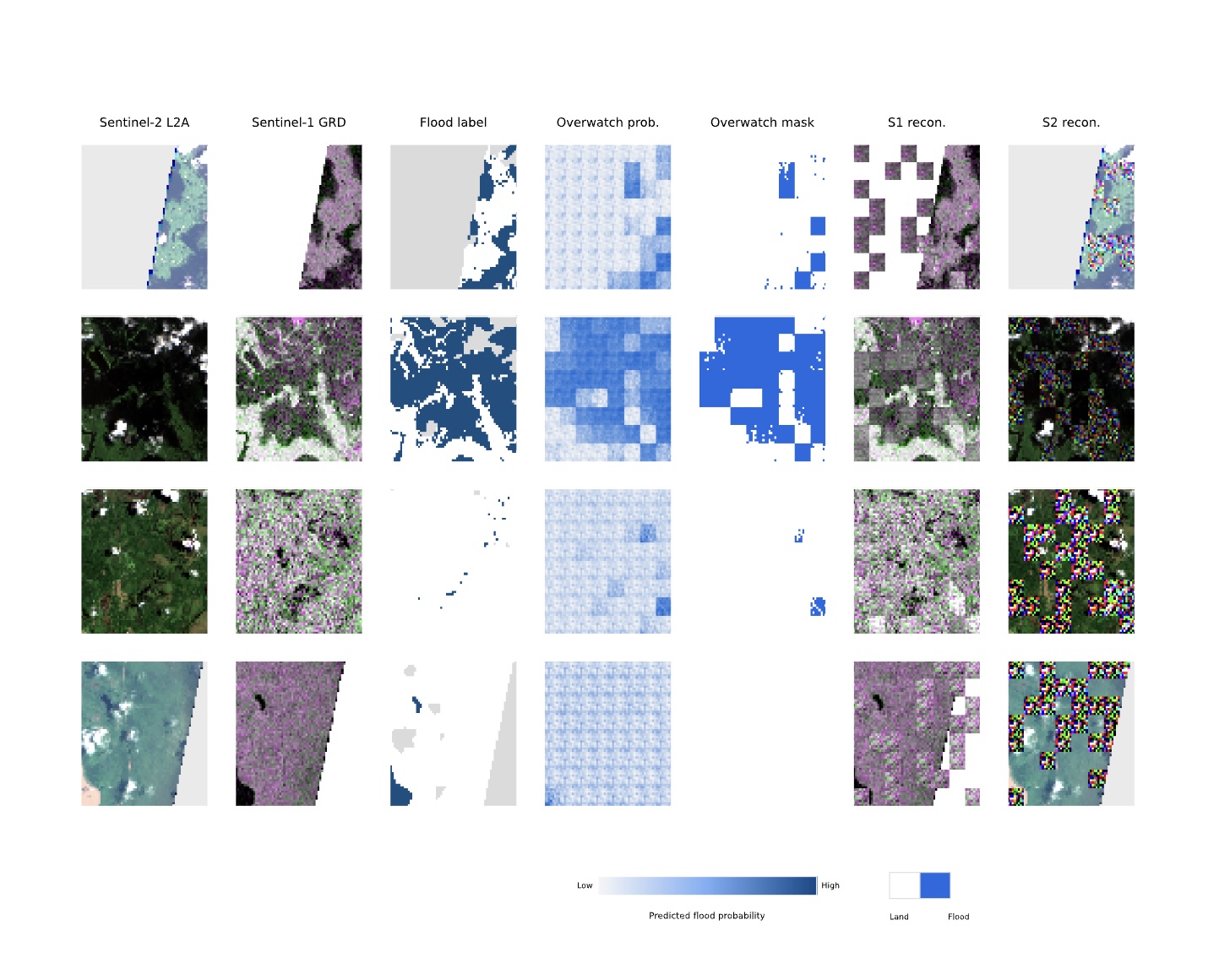
Overwatch: Multimodal Remote Sensing World Model
Foundation geospatial model trained on multispectral remote sensing data to rapid evaluate change, land usage, flood tracks, and data imputation against noise.
AS SEEN IN
 Reuters
Reuters  Wired
Wired  Reddit
Reddit  Hacker News
Hacker News  BBC
BBC  CNN
CNN  National Geographic
National Geographic  The Guardian
The Guardian  Smithsonian
Smithsonian  PBS
PBS  Google
Google  OpenAI
OpenAI  Harvard Gazette
Harvard Gazette  The Harvard Crimson
The Harvard Crimson  University of Chicago
University of Chicago  Lonely Planet
Lonely Planet  Matterport
Matterport  Polycam
Polycam  Replicate
Replicate  LiveScience
LiveScience  Sharp
Sharp  Nerdist
Nerdist  Washington Post
Washington Post  Boston Globe
Boston Globe  My Modern Met
My Modern Met IN PROGRESS
Predictive Real2Sim2Real Digital Twins: A World Model Approach to Deformable Mesh and Soft-Body Simulation Physics
2026Applying world model architectures to predictive physics simulation for deformable objects.
Conformal Inference in Language Model Based Survey Simulation
2026Simulating human behavior with a conformal inference pipeline and LLMs
Spatiotemporal Representations of Urban Mobility and 3DGS with Remote Sensing
2026Novel approach to represent urban mobility data with spatiotemporal transformers and language-grounded 3D gaussian splatting.
EXPERIENCE
EDUCATION
PATENTS
Patent-pending systems and methods for probabilistic world-state estimation and forecasting from heterogeneous real-world observations.